Рассказ о летающих ветряках начат здесь. А сейчас немного истории. Принцип создания подъёмной силы несущим винтом, в условиях авторотации встречным потоком воздуха известен уже почти сотню лет. Летательные аппараты – гиропланы (устоявшийся термин в России – «автожир»)- впервые были построены и испытаны ещё в начале прошлого века испанским инженером Хуаном де ла Сиерва.

Гиропланы стали технологическими предшественниками вертолётов, но с появлением последних отнюдь не ушли со сцены. Ведь они конструктивно проще, неприхотливее, доступны в освоении даже неопытным пилотам. И наоборот – одним из режимов аварийной посадки вертолётов с отключенным двигателем – является как-раз таки режим гиропланирования.

Типичный профиль полёта гироплана включает следующие стадии. Для начала полёта гироплана необходимо раскрутить его несущий винт так, чтобы он создавал подъёмную силу. Обычно это делается путём кратковременного подключения маршевого двигателя к муфте несущего винта или от внешнего источника. Затем гироплан совершает короткий разбег по взлётной полосе, во время которого встречный поток воздуха создаёт дополнительную подъёмную силу на лопастях вращающегося винта и аппарат взлетает. На всём протяжении полёта ему уже нет необходимости принудительно вращать винт мотором – это делает набегающий поток воздуха. Простота и надёжность трансмиссии, отсутствие в ней высоконагруженных узлов и сложных агрегатов позволило освоить серийный выпуск гиропланов в ряде стран ещё до начала IIWW. В том числе в СССР и Германии.
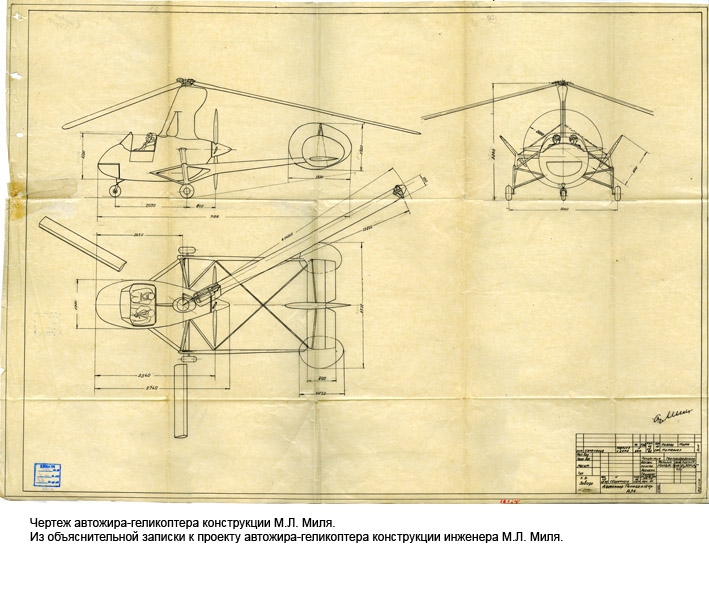
 Причем, если в России таковое производство было в основном опытным, а вскоре и вовсе свёрнуто (ведущие конструкторы гиропланов – Н.И.Камов и М.Л.Миль – полностью переключились на вертолётную тематику), то в Германии оно осуществлялось с размахом.
Причем, если в России таковое производство было в основном опытным, а вскоре и вовсе свёрнуто (ведущие конструкторы гиропланов – Н.И.Камов и М.Л.Миль – полностью переключились на вертолётную тематику), то в Германии оно осуществлялось с размахом.

Впрочем, в СССР было написано несколько интересных книг и даже учебники по конструированию гиропланов. Их активно используют энтузиасты, занимающиеся сегодня любительской постройкой сверхмалых летательных аппаратов. Некоторые из них пригодились мне при расчётах аэродинамики LONGWIND.
Но вернёмся к истории. Пока в СССР доминировало отношение к гиропланам, как к «переходному звену эволюции» предшествующему вертолётам, в Германии их изначально рассматривали в качестве самостоятельного класса летательных аппаратов с уникальными свойствами. Справедливости ради надо заметить, что о и вертолётах там тоже не забывали – первые в мире серийные гелекоптеры выпускались тоже в Германии. Но интерес к гиропланам военного назначения у немцев был примерно таков же, как к мотоциклам в мото-пехоте.
И пусть достигнутые результаты оказались скромней ожиданий, народная молва дописала германским гиропланам по истине фантастические свойства. Так например, в послевоенном фольклоре ужился миф о «турбореактивном дисковом гироплане», созданном якобы в Чехословакии по заказу люфтваффе в последние годы войны.

 Реактивный гироплан люфтваффе "Флюгегельрад II V2" диаметр ротора: 14,4 м, втулки: 3,6 м,
Реактивный гироплан люфтваффе "Флюгегельрад II V2" диаметр ротора: 14,4 м, втулки: 3,6 м,
частота вращения ротора: 500 -1650 об/мин, взлетная масса: 7 т, высота: 2,2 м, скороподъемность: 100 м/с, скорость: 800 км/ч, потолок: 12000 м."


частота вращения ротора: 500 -1650 об/мин, взлетная масса: 7 т, высота: 2,2 м, скороподъемность: 100 м/с, скорость: 800 км/ч, потолок: 12000 м."
Беглого взгляда достаточно, что бы понять всю нереальность машины. К.п.д. несущего винта с таким числом широких лопастей, будь она и вправду построена, оказался б столь мал, что даже мощный газо-турбинный двигатель не смог бы её поднять в воздух. Ещё больше сомнений вызывают приведённые техническеи характеристики. Например, при частоте врашения ротора 1650 об/мин концы его лопастей (диаметр 14,4 м) двигались бы со скоростью более 1500 м/с, что в 5 раз превышает скорость звука. Даже если предположить, что нашёлся бы некий источник энергии, способный их так разогнать, вопрос тепловой прочности при разогреве от трения о воздух остаётся открытым. Соверменненные сверхзвуковые самлёты имеют серьёзные тепловые проблемы уже начиная со скоротсей всего в 2 раза больших скорости звука.
Но мифы не умирают.
На самом деле практический интерес представяли лешь некоторые машины.
Это, прежде всего, германский десантный автожир FA225

британский аэроджип "Rotobuggy"

и снова германский Focke-Achgelis Fa.330 "Bachstelze".

В отличие от мифического "чудо-оружия" - это реальные образцы действующей техники, некоторые экземпляры котороой дожили до наших дней в музеях и выставках всего мира :
здесь http://falkeeins.blogspot.com/2010/09/focke-achgelis-fa-330-bachstelze.html
здесь http://www.flickr.com/photos/fotero/6236741283/
и ещё здесь http://www.flickr.com/photos/phantom2/3335483848/
(На момент подготовки этой статьи насчитывалось 17 "живых" экземляров FА.330 в экспозиционных центрах Германии, Франции, Великобритании и США)
А вот здесть есть архивное видео
Особенностями всех этих аппаратов было:
во-первых, осутствие на борту двигателя (за исключением "аэроджипа", где мотор в полёте не использовался) - все они были буксируемые, и летали исключительной силой ветра.
А во вторых - это маленькие по размеру, но весьма эффективные аппарты. Ведь скажем первозить джипы по воздуху вертолёты научислись только в конце 50-х годов. А размеры FA.330 и вовсе были столь малы, что в сложенном виде он помешался в рубку субмарины.
Поражает аскетическая простота и изящество этих безмоторных машин. Например, раскрутка винта FA.330 выполнялась в ручную экипажем подводной лодки. На стартовый шкив ротора гироплана наматывалась длинная веревка и несколько матросов-подводников её с силой дёргали. Аппарат взлетал! Вот и все "высокие технологии".

Запуск разведовательного гироплана FA330 с борта подводной лодки
Эта техника летала исключительно благодаря ветру. И неплохо летала.
Но поучительным в этой истории для нас остаётся ещё один факт: большие автожиры не смогли конкурировать с равными им по весу летательными аппаратами других конструкций. А вот маленькие - выжили.
На мой взгляд, это же правило справедливо и для высотной ветроэнергетики: здесь будет иметь значение не размер, а мобильность.
здесь http://www.flickr.com/photos/fotero/6236741283/
и ещё здесь http://www.flickr.com/photos/phantom2/3335483848/
(На момент подготовки этой статьи насчитывалось 17 "живых" экземляров FА.330 в экспозиционных центрах Германии, Франции, Великобритании и США)
А вот здесть есть архивное видео
Особенностями всех этих аппаратов было:
во-первых, осутствие на борту двигателя (за исключением "аэроджипа", где мотор в полёте не использовался) - все они были буксируемые, и летали исключительной силой ветра.
А во вторых - это маленькие по размеру, но весьма эффективные аппарты. Ведь скажем первозить джипы по воздуху вертолёты научислись только в конце 50-х годов. А размеры FA.330 и вовсе были столь малы, что в сложенном виде он помешался в рубку субмарины.
Поражает аскетическая простота и изящество этих безмоторных машин. Например, раскрутка винта FA.330 выполнялась в ручную экипажем подводной лодки. На стартовый шкив ротора гироплана наматывалась длинная веревка и несколько матросов-подводников её с силой дёргали. Аппарат взлетал! Вот и все "высокие технологии".

Запуск разведовательного гироплана FA330 с борта подводной лодки
Эта техника летала исключительно благодаря ветру. И неплохо летала.
Но поучительным в этой истории для нас остаётся ещё один факт: большие автожиры не смогли конкурировать с равными им по весу летательными аппаратами других конструкций. А вот маленькие - выжили.
На мой взгляд, это же правило справедливо и для высотной ветроэнергетики: здесь будет иметь значение не размер, а мобильность.




















